
簡易水位監視装置「生産二課・みずた係長」の製作メモ③
経過報告
田植えからおおむね1ヶ月が経過しました。
その後のみずた係長はというと・・・

ちょうど「中干し」という期間に入り、稲の根を強くしたり、稲刈り作業をしやすい土壌にしたりするために、田んぼから水を抜いてしまっています。
ですから、しばらく出番なしですね。
グラフはこちら↓

前回、省電力化のためにプログラムを改修し、待機中は通信回線を切断し、時間になったら再接続するという方法に変更しました。
その結果、45,000mAhのアウトドアバッテリーで約1週間の稼働でした。
思ったよりまだまだ短いですね。
また、まれですが再接続に失敗してデータを送れていないこともあります。
致命的なほどではないので、省電力化とのトレードオフでもOKな範疇ですが、もっとバッテリーを長持ちさせたいので、引き続き、プログラムを改修し実験中です(このページの最後にプログラムを掲載しています)。
そしてさらに、より効率的に実験、より現実的な筐体を目指すべく、みずた係長2号機の製作に着手しました。
2号機の主な材料
筐体は引き続き塩ビパイプです。加工や組み立てがしやすく、入手性もいいので重宝します。

また、1号機はセンサー部と基板やバッテリー収納部を分けて設置していましたが、今回は一体型を目指して防水・防塵のプラボックスを調達しました。
使用したのはこちら
→タカチ電機工業 BCAP型防水・防塵開閉式プラボックス BCAP162110G(Amazon)

電源は、だれでもおなじみの電源で調達・交換も容易な、単一電池4本の6V駆動で実験します。

フロートスイッチをはじめ、簡易的に水位を測るという機能的な部分の変更はありません。
筐体の製作
基板や電源を収納するプラボックスは横向きに配置し、塩ビパイプと固定パーツを使ってビス止めしました。
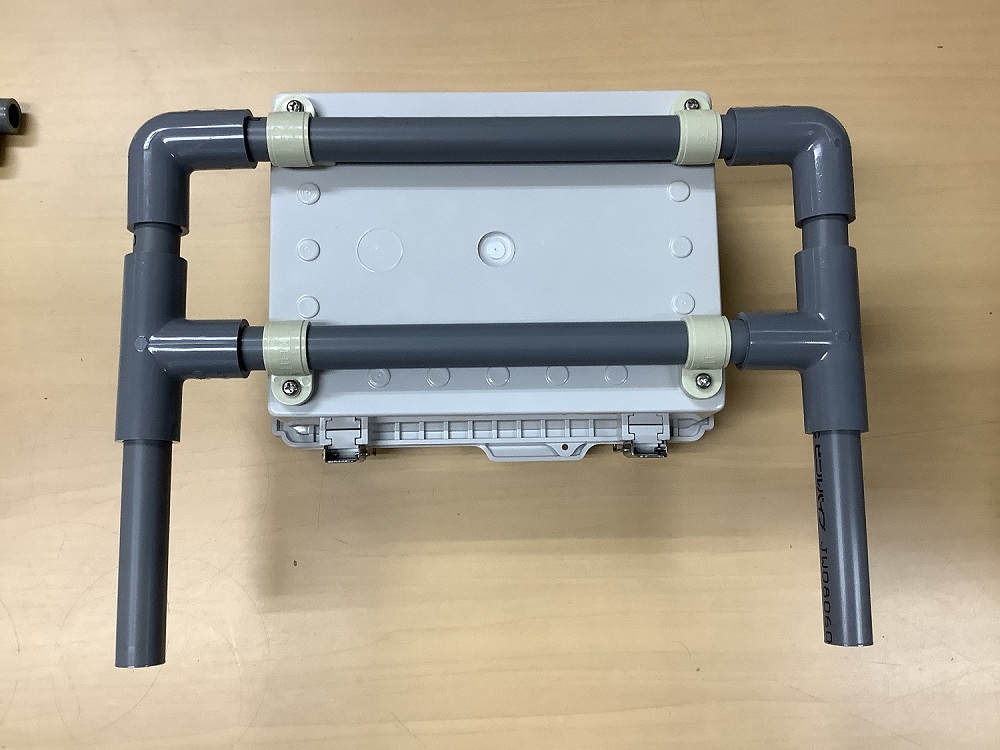
筐体の横幅のサイズは、このプラボックスに合わせた感じですね。
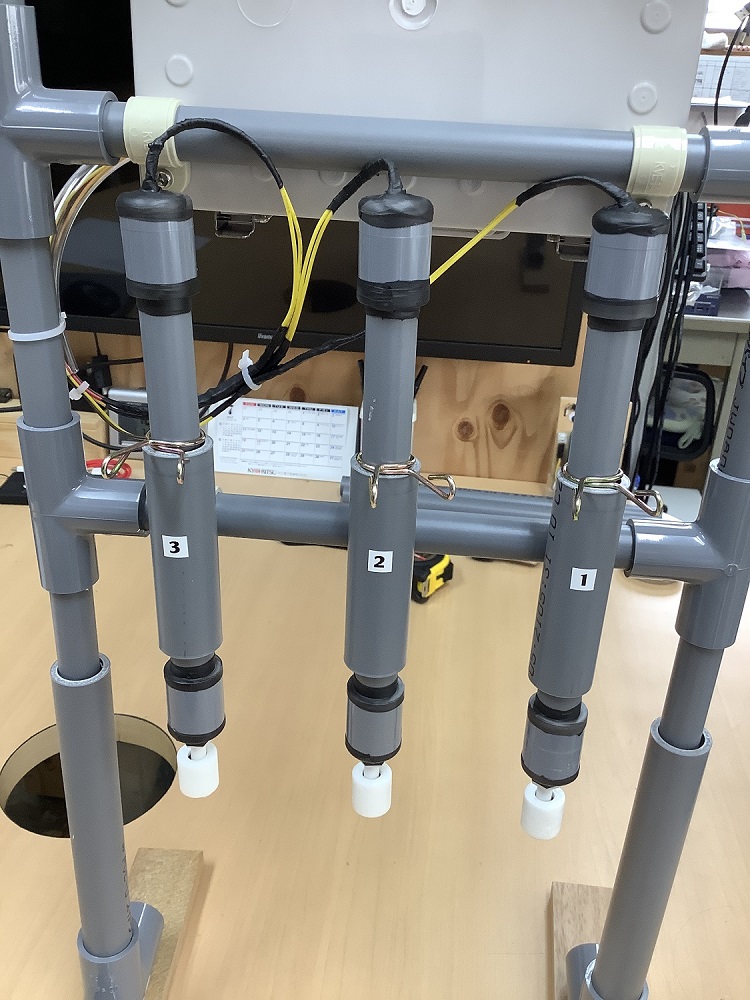
次にフロート部分。
1号機は、L字金具でフロートの高さ調整をしていましたが、今回はできるだけ塩ビパイプを使った仕組みにしてみました。
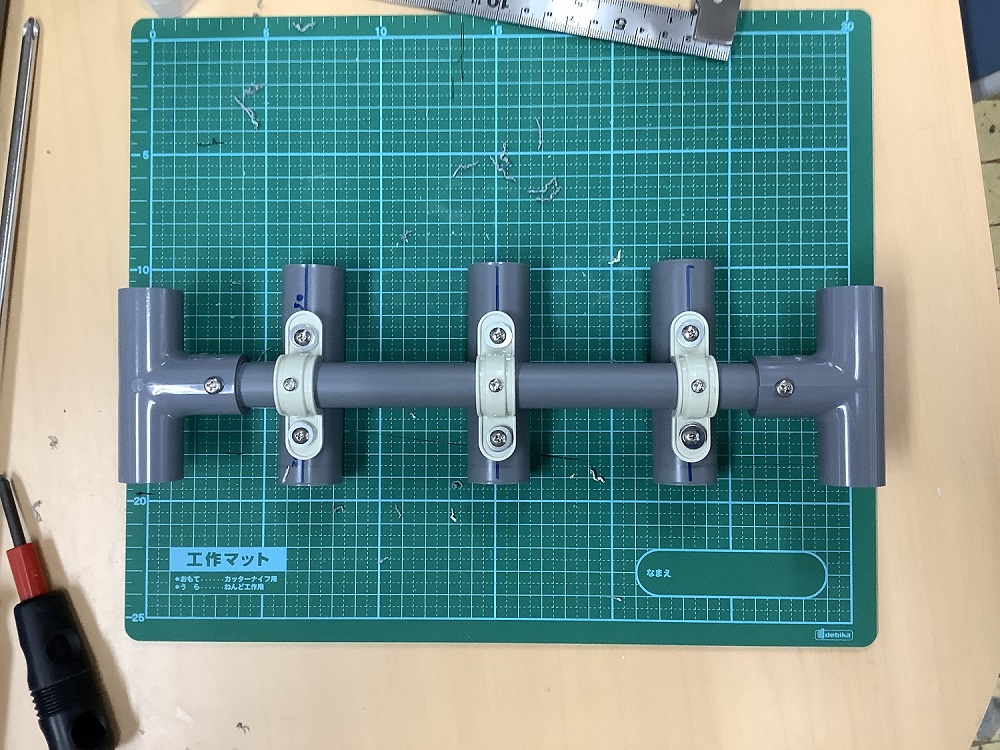
太い塩ビパイプに細い塩ビパイプを差し込み、高さ調整の機構にしています。
上下には穴をあけたキャップをして、下側にフロートスイッチを設置。
ただ、そのままだと調整した高さを固定することができませんので、バンドバネというわっかになった洗濯ばさみのような金具を上側に入れて固定できるようにしました。
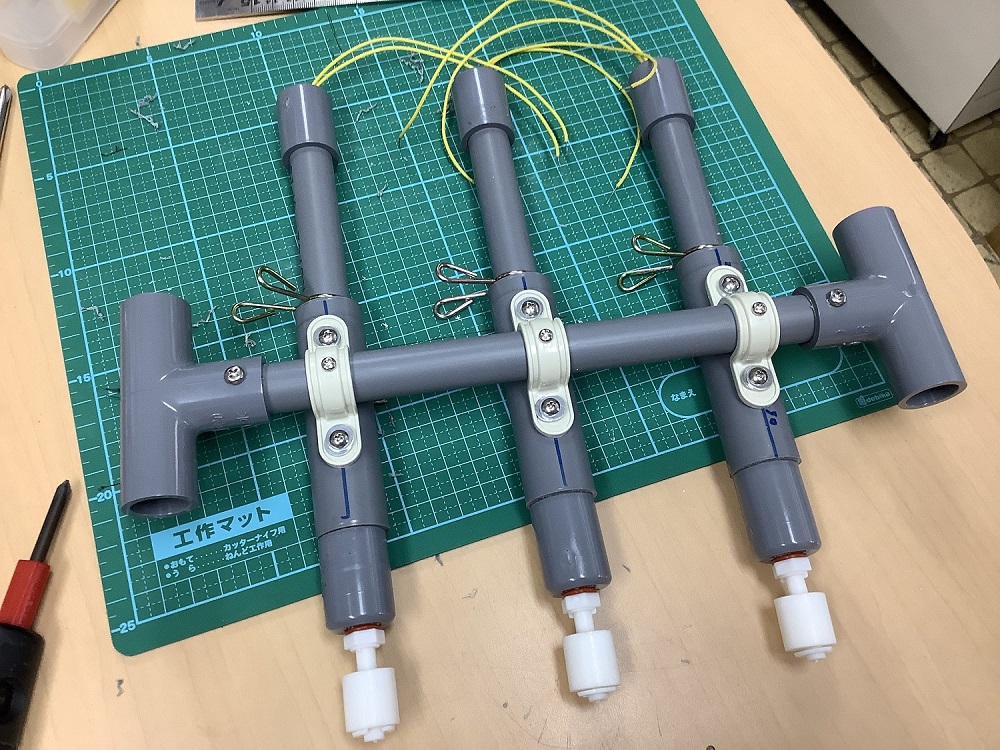
実はここはこだわりの部分で、
- 高さ調整をするときに工具が必要ない
- うっかり外れて田んぼの中に落ちるようなネジ類を使わない
という点を考慮しながら考えました。
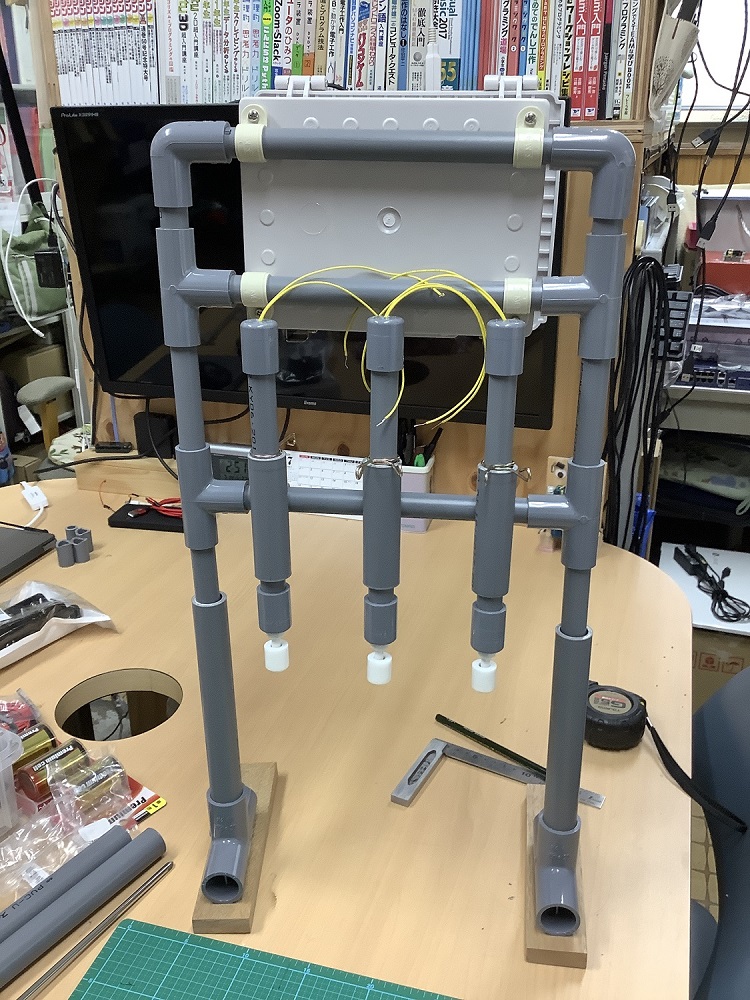
プラボックス部分とフロート部分を合体すると、筐体の完成です。
※足の部分は作業しやすいように作ったスタンドです。
全体的にちょっと高さが増えたので、その点は気になります(できるだけ田園風景を損なわないよう、設置後の高さは低くしたいとの思いから)。
プラボックス内部の製作
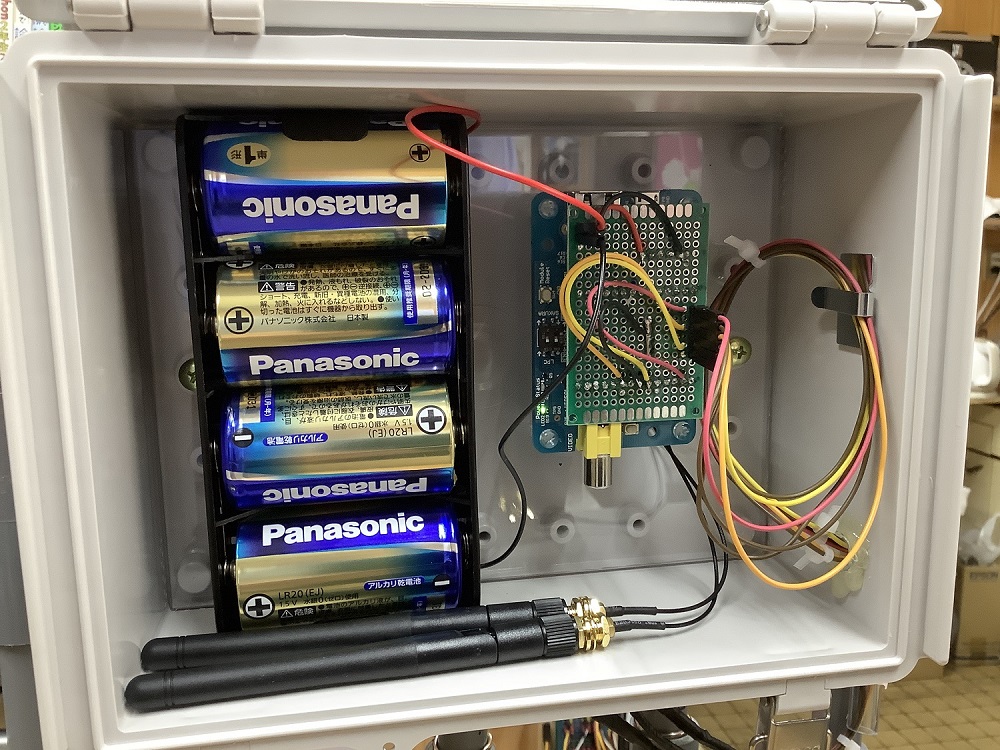
プラボックス内部には、IchigoSodaと電池ボックスが入ります。
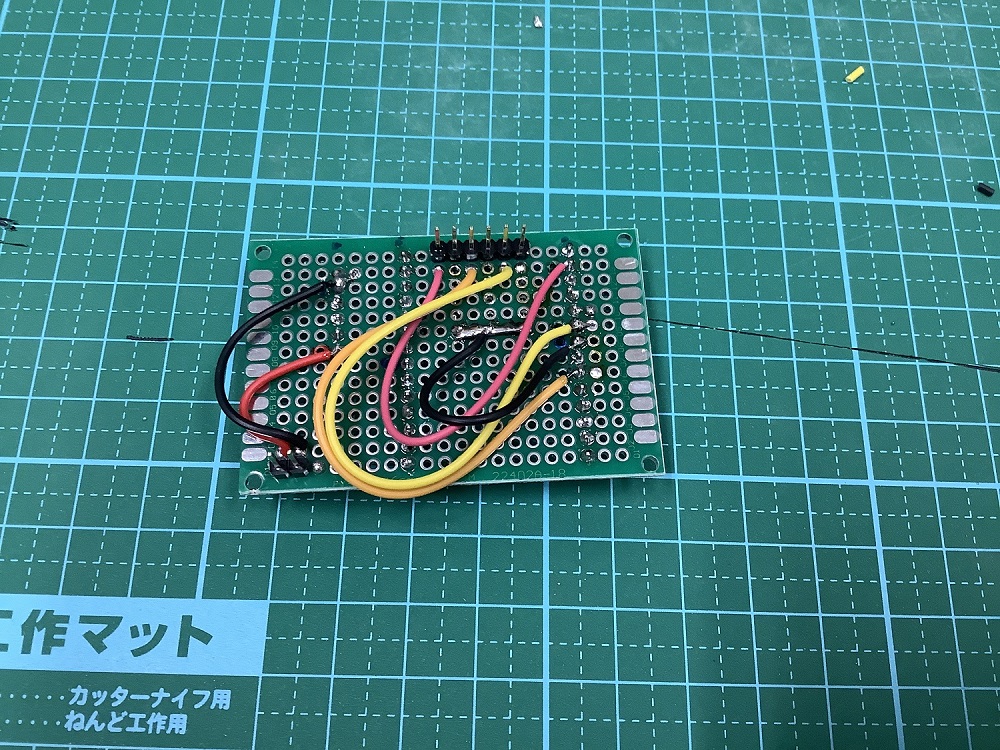
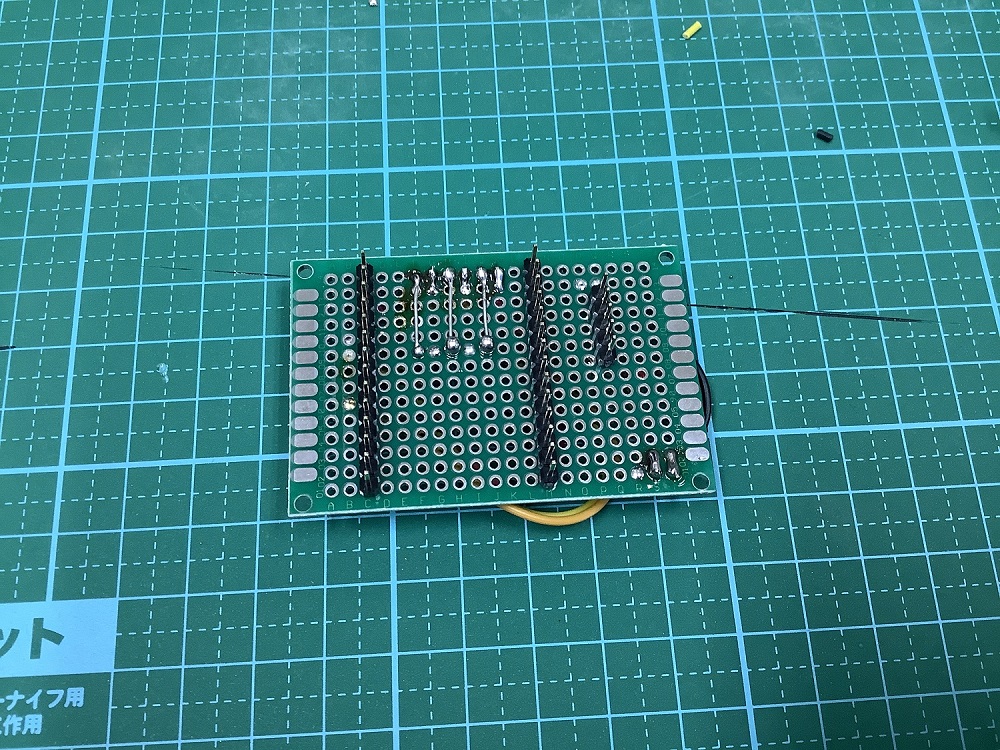
今回は、電池ボックスやフロートスイッチからの接続がしやすいように、ユニバーサル基板にピンヘッダ―を配置したIchigoSoda用のシールドを試作しました。
※はんだ付けが適当なのはご容赦。
プラボックスへの収納方法ですが、直接プラボックス内に固定しないで、いったんアクリル板に固定します。
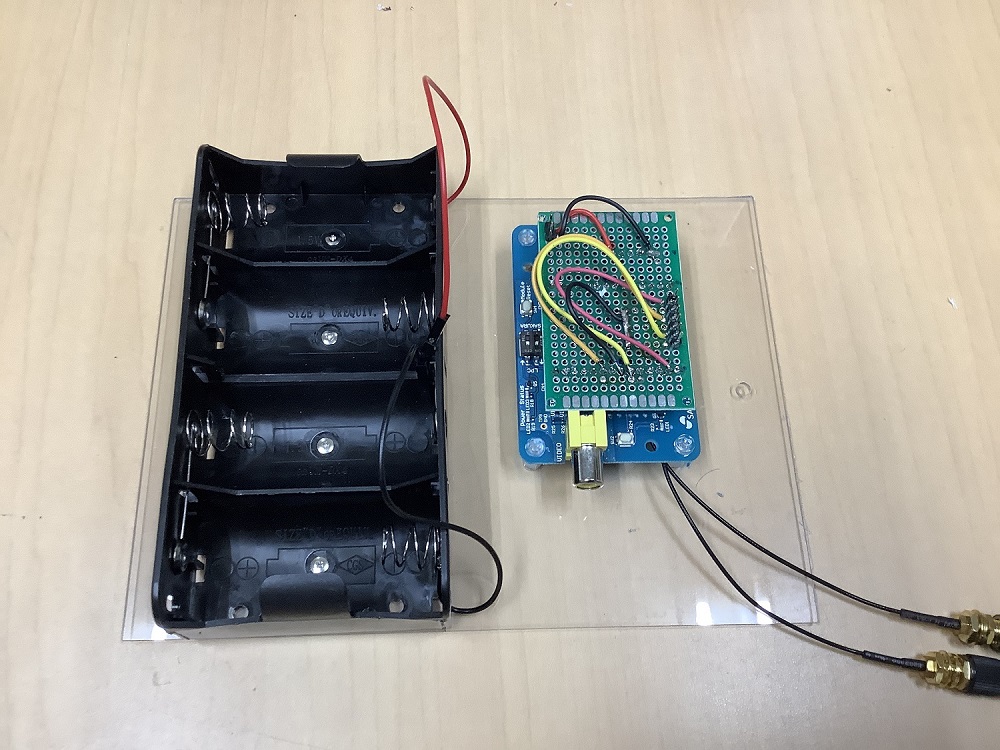
これをプラボックスに収納し、アクリル板をプラボックスにネジ止めします(ネジはプラボックスに付属)。
こうすることで、メンテナンスや、オフシーズンにこの部分だけを回収して保管できるというメリットがあります。
プラボックスには線を通す穴がありませんので、穴をあけて水が入らないようにチューブを通し、配線すれば組立完了。

最後にフロート部分や配線部分の必要な箇所を融着テープでしっかり防水しておきます。
これでみずた係長2号機の完成です!


1号機に比べるとより製品っぽくなりました!
2号機のプログラム
2号機のプログラムは、1号機で使用していた待機中は通信回線を切断するプログラムを踏襲しつつ、少し改修して、IchigoJamの動作クロックを下げてみました。
10 @ARUN
20 VIDEO 0,4
30 OUT 1,-2
40 '
50 WAIT 1800,0
60 '
70 N=0
80 [0]=IN(5)
90 [1]=IN(4)
100 [2]=IN(9)
110 '
120 IF [2]=1 THEN N=3:GOTO 150
130 IF [1]=1 THEN N=2:GOTO 150
140 IF [0]=1 THEN N=1
150 '
160 IOT.OUT N
170 '
180 WAIT 900,0
190 '
200 OUT 8,0
210 '
220 WAIT 10800,0
230 '
240 OUT 8,1
250 '
260 GOTO 4020行目の「VIDEO 0,4」で、動作クロックを1/4にしています。動作クロックを下げることにより通常よりも省電力となります。(→ボクにもわかる IchigoJam用 マイコンボード by 国野 亘 @bokunimo.net/IchigoJam スリープ方法・省電力動作方法)
これに伴って、WAITの数値も1/4に変更しています。
さて、単一電池4本でどのくらい持つでしょうか…ワクワク
また改めて報告したいと思います。
2号機の設置
田んぼはまだまだ中干し中で水はありませんが、梅雨も明けて夏本番な屋外環境での動作テストも必要ですので、さっそく設置しました(1号機とは別の田んぼです)。
設置方法はとても簡単。
基礎用の2本の塩ビパイプをハンマーなどでしっかりと田んぼに打ち込みます。

あとは、本体をゆっくり差し込むだけ!以上!
固定しなくても重みがありますので、水で浮くことはありません。

フロートは、平時の水位で2番フロートが浮く状態にして基準とし、1番は下へ、3番は上へ高さ調整すればOKです。
今回は仮で設置していますので、また水が入れば再調整したいと思います。

1号機のプログラム
約1週間でバッテリー切れとなった1号機ですが、再びプログラムを改修して実験中です(前回のプログラムは製作メモ②をご覧ください)。
前回は待機中は通信回線を切断する方法をとっていましたが、まれに再接続に失敗することもありましたので、今回は通信回線を切断せず、無通信時に自動的にスリープになる「オートスリープ」とIchigoJamの動作クロック1/4を併用してみました。
10 @ARUN
20 VIDEO 0,4
30 OUT 1,-2
40 '
50 WAIT 1800,0
55 POKE#800,#B0,1,1,#B0:?I2CR(79,#800,4,#820,3)
60 '
70 N=0
80 [0]=IN(5)
90 [1]=IN(4)
100 [2]=IN(9)
110 '
120 IF [2]=1 THEN N=3:GOTO 150
130 IF [1]=1 THEN N=2:GOTO 150
140 IF [0]=1 THEN N=1
150 '
160 IOT.OUT N
170 '
220 WAIT 13500,0
250 '
260 GOTO 6055行目で通信モジュールのオートスリープ機能をONにしています。
こちらもどうなるのかまた改めて報告したいと思います。